GRASP
@ Ontario Tech University
Reserach
Interactive Autonomous Robotic Manipulation
Autonomous system
Visual servoing
Impedance control
Machine learning
Computer vision
Advanced control
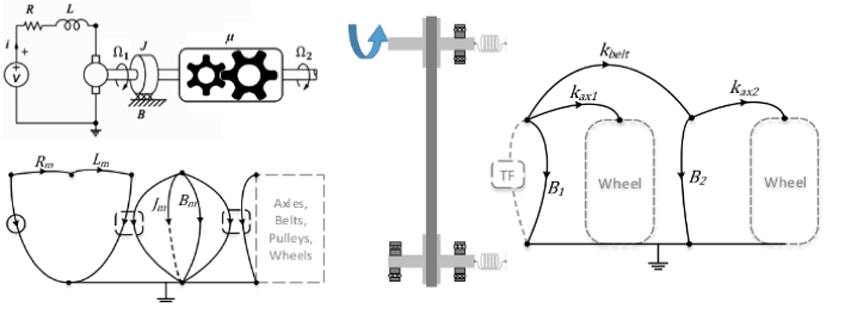
Automated Mechatronic Design
Multi-domain mechatronics design
Linear graph
Machine learning
Artificial intelligence
Optimization
Applications of Autonomous Systems
Multi-object identification and tracking
Environment perception and modeling
Robot automated mapping (dynamically mapping and updating maps)
Localization (understanding its own location)
Autonomous navigation
Robotic manipulation
Vision based motion control
Enviroment sensing (e.g., gas detection, environment monitoring)
Menu
Homepage
People
Research
Publiucations
Courses
Lab Resoures
Reserach Resources
Forms and Documents
Sponsors and Partners
Get in touch
Lab Location:
Automotive Centre of Excellence
Room: (ACE 2030C-2)
haoxiang.lang@ontariotechu.ca
+1 (905) 721-8668
2000 Simcoe Street North
Oshawa, ON L1G 0C5