MECE 3350U: Control Systems
Course Description
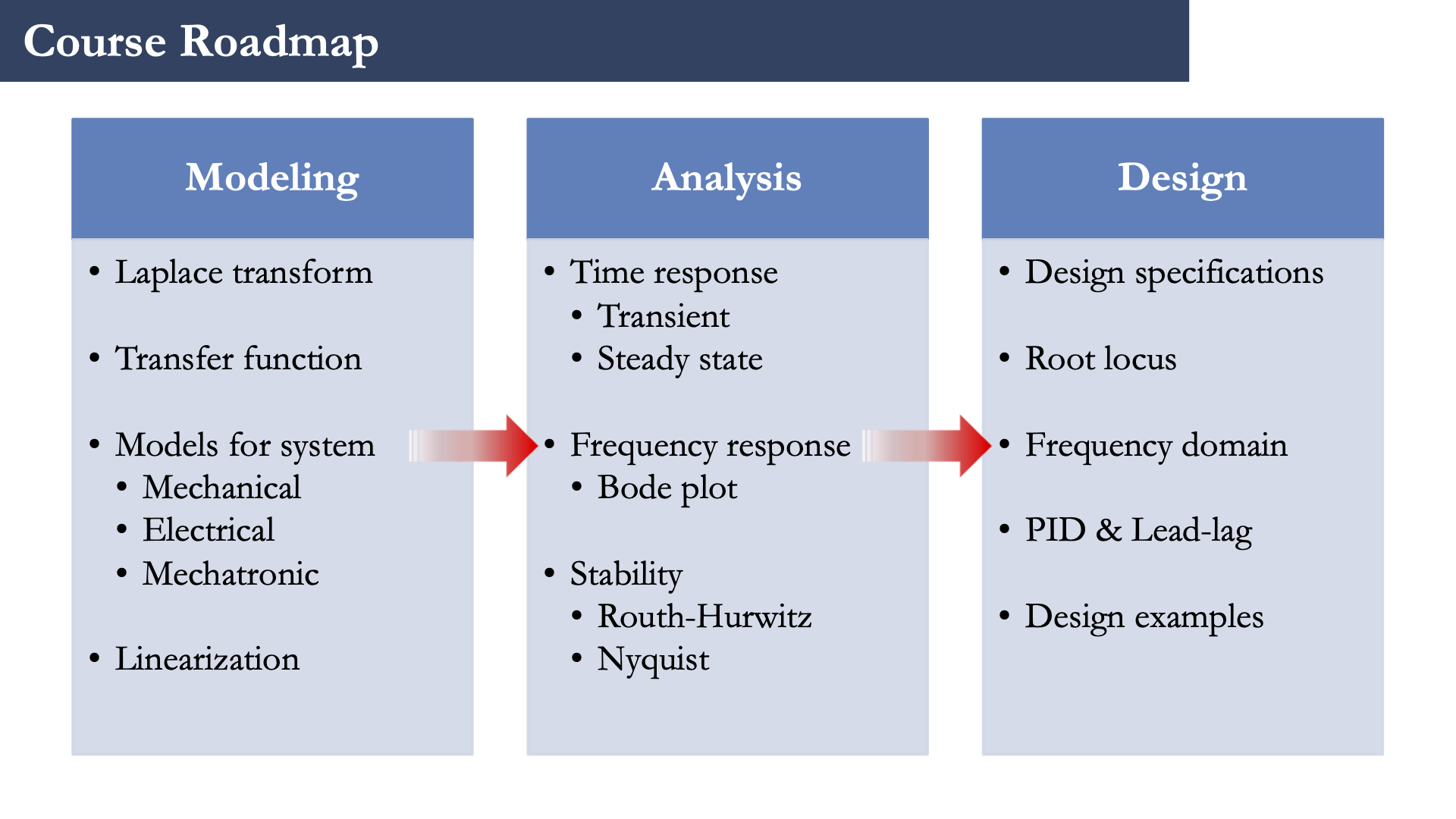
Analysis and synthesis of linear feedback systems by classical and state space techniques. Nonlinear and optimal control systems. Modelling of dynamic systems; analysis of stability, transient and steady state characteristics of dynamic systems; characteristics of feedback systems; design of PID control laws using frequency response methods and the root locus technique. Introduction to nonlinear and optimal control systems.
Students who successfully complete the course should have reliably demonstrated the ability to:
- carry out analysis and synthesis of linear feedback systems using classical and state space techniques
- model control systems in a wide variety of engineering scenarios
- perform stability and steady–state analyses of dynamic systems
- understand the characteristics of feedback control systems
- work with the PID controller laws and be able to design systems using frequency response methods and the root locus technique
- apply the theory established in the course to some common systems that incorporate active control systems
- use software and computer tools for the design and simulation of control systems
| Course Outline: | Course Outline | |
| Textbook: | Norman S. Nise, Control Systems Engineering, 8th Edition, Wiley, 2020. Textbook | Zybooks.com Interactive Texxbook |
| Note: Matlab and Matlab Simulink are required in the course. | ||
| Course TA(s): | Shafakat Masud Office hours: TBD | email: mdshafakat.masud@ontariotechu.net |
| Ethan Stefan-Henningsen Office hours: TBD | email: omid.ahmadikhiyavi@ontariotechu.net | |
| Md Omar Faruq Joney Office hours: TBD | email: mdomarfaruq.joney@ontariotechu.net | |
| Lucas Wong Office hours: TBD | email: lucas.wong@ontariotechu.net |
Time and Location
| Lectures | Section 021 (Classroom: SCI 1140) | Tuesdays: 5:10 pm to 6:30 pm Thursdays: 5:10 pm to 6:30 pm |
| Labs | Please check your schedule | SIRC Building |
| Tutorials | Please check your schedule | In Class |
Course Notes
| Item | Title | Material |
|---|---|---|
| Lecture 1 | Course Overview and Introduction | Slides |
| Lecture 2 | Laplace Transform | Slides Notes |
| Lecture 3 | Transfer Function and Block Diagram | Slides Notes |
| Lecture 4 | Modeling of Mechanical Systems | Slides Notes |
| Lecture 5 | Modeling of Electrical Systems | |
| Lecture 6 | Modeling of DC Motors and Linearization | |
| Lecture 7 | Time Respone of First Order Systems | |
| Lecture 8 | Time Response of Second Order Systems | |
| Lecture 9 | Stability | |
| Lecture 10 | Routh Hurwitz Stability Criterion | |
| Lecture 11 | Routh Hurwitz Stability Criterion (Examples) | |
Midterm Exam |
In-class Exam |
October 22, 2025 |
| Lecture 12 | Steady State Error | |
| Lecture 13 | Root Locus Technique | |
| Lecture 14 | Root Locus Examples | |
| Lecture 15 | Root Locus_Lead-Lag Compensator Design | |
| Lecture 16 | Bode Diagram | |
| Lecture 17 | Bode Diagram of Connected Systems | |
| Lecture 18 | Nyquist Stability Criterion | |
| Lecture 19 | PID Control | |
| Lecture 20 | Frequency Domain Specifications and Shaping | |
| Lecture 21 | Frequency Domain Lead and Lag Compensator Design |
Labs
Homework
Example Homework and Exams
| Homework 1 | Sample Homework 1 |
| Homework 2 | Sample Homework 2 |
| Homework 3 | Sample Homework 3 |
| Homework 4 | Sample Homework 4 |
| Homework 5 | Sample Homework 5 |
| Midterm Exam | Sample Midterm Exam |
| Final Exam | Sample Final Exam |